机械手
机械手是制造业从“劳动密集”向“技术密集”转型的核心载体,其行业特点体现为“全制造业渗透、智能化协作化升级、国产替代加速”,应用优势在于通过“高精度、高效率、强柔性、高安全”破解人工与专用设备的局限。
行业特点
1.应用场景全覆盖与细分深化
按用途分为工业机械手(焊接、搬运、装配、喷涂)、协作机械手(人机共线作业)、移动机械手(AGV+机械臂复合)、特种机械手(医疗手术、核工业检修);按结构分为多关节机械手(6轴为主,负载3-500kg)、SCARA机械手(平面高速作业)、Delta机械手(轻载高速分拣),需适配不同场景的精度(±0.01mm-±0.5mm)、负载(0.5-1000kg)及自由度需求。随工业4.0推进,机械手向微米级精度(如半导体芯片搬运)、高速化(SCARA机械手速度≥200次/分钟)、智能化(集成力觉反馈、视觉引导、AI决策)发展;协作机器人突破安全瓶颈(碰撞检测力≤150N),人形机器人探索复杂环境适应(双足行走+双臂操作)。
2.极端环境适应性需求凸显
工作场景涵盖洁净室(半导体车间Class 100)、高温/高粉尘(铸造、焊接)、有毒有害(化工、核工业),设备需具备IP65+防护等级、耐腐蚀性(如不锈钢机身)、防爆设计(Ex d IIB T4);医疗机械手需无菌涂层(生物相容性认证)。
3.安全与标准化体系完善
需符合《工业机器人安全要求》(ISO 10218)、《协作机器人通用技术条件》(GB/T 39402),配置急停、防碰撞(力矩传感器)、权限管理功能;协作机器人需通过PL=d安全认证(ISO 13849),确保人机共线安全。
4.定制化与模块化并行
通用机械手(如6轴搬运机器人)面向中小客户,而新能源(大圆柱电池搬运)、半导体(晶圆传输)领域需专用机械手(如防静电涂层、真空吸附末端);推动“本体模块化+软件定义功能”(如快速更换末端执行器模块)。
5.产业链自主可控加速
依赖上游核心部件(减速机、伺服电机、控制器占成本60%+)、中游系统集成(如埃斯顿、新松)、下游终端应用(汽车、3C);国产替代突破(绿的谐波谐波减速机市占率超30%、双环传动RV减速机进入特斯拉供应链),与下游智能制造需求联动紧密。

应用优势
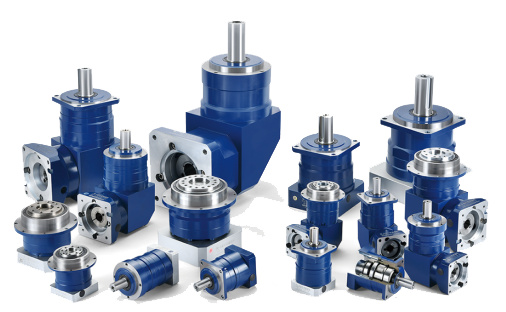
1.精密行星减速机
应用优势:体积小、传动效率高(≥96%)、背隙低(≤1弧分),适配机械手驱动系统(如底座回转、手臂伸缩电机的减速增扭),提升低速运动稳定性(避免爬行)。
典型场景:SCARA机械手的Z轴升降模块、Delta机械手的并联臂驱动单元,通过精准控速保障高速分拣(如电子元件拾取,重复定位精度≤±0.02mm)。
2. 机器人关节RV减速机
应用优势:耐冲击、抗过载(瞬时扭矩达额定值4倍)、寿命长(≥20000小时),适用于重载多关节机械手(如汽车焊接机器人、大负载搬运机械臂)。
典型场景:6轴工业机械手的J1-J3基座关节(承载手臂自重+负载),驱动200kg以上负载(如汽车车身部件搬运),适应24小时连续作业(节拍≤30秒/次)。
3. 人型机器人关节减速器(含谐波减速机)
应用优势:谐波减速机体积小、传动比大(50-300)、回差小(≤1弧分),人型关节减速器兼顾灵活性与负载能力(如双足行走的髋/膝关节);协作机器人关节常用谐波减速机实现轻载高精度。
典型场景:协作机械手的6个关节(负载≤20kg)、人形机器人的手臂关节(如特斯拉Optimus的肩/肘部),通过高回差控制(≤0.5弧分)实现精密装配(如手机零部件螺丝锁付)。
4. 中空旋转平台
应用优势:中空结构便于走线/气管(如机械手末端的真空吸盘管路、传感器线缆),重复定位精度高(≤±0.01°),支持多工位同步转位(替代分度盘)。
典型场景:多工位检测机械手的旋转工作台(如3C产品外观检测线),带动工件精确转位(角度偏差≤±0.5°),实现360°全方位扫描,检测效率提升50%。
5. 滚动直线导轨
应用优势:摩擦系数低(≤0.002)、刚性高(额定动载荷≥30kN)、寿命长(≥2000km),是机械手手臂伸缩机构(如直角坐标机械手)、末端执行器导向的核心部件。
典型场景:龙门式搬运机械手的X/Y轴滑座导向、SCARA机械手的垂直导轨,通过低摩擦特性减少振动,保障长距离定位精度(≤±0.03mm/米)。
6. AGV舵轮减速机
应用优势:集成驱动与转向功能,支持±180°灵活转向,定位精度±5mm,适配移动机械手(AGV+机械臂复合)的底盘驱动。
典型场景:智能仓储的料箱搬运机械手,AGV舵轮驱动底盘在货架间穿梭(速度≤1.5m/s),机械臂同步完成货物抓取(负载≤50kg),实现“移动+作业”一体化。
7. 电动滚筒
应用优势:结构紧凑(无外露链条)、调速范围广(0.1-3m/s)、免维护(IP65防护),适配机械手末端输送集成(如流水线对接)。
典型场景:包装线贴标机械手的标签输送辊道,电动滚筒驱动标签带匀速输出,与机械臂贴标动作同步(误差≤±0.1秒),替代传统电机+减速器组合。
性能要求
1.精度保持性
长期运行后重复定位精度需≤±0.02mm(如6轴机械手)、≤±0.01°(如旋转关节),确保精密装配(如轴承压装过盈量控制)、半导体搬运(晶圆碎片率≤0.001%);人形机器人关节需更高精度(≤±0.5弧分)以模拟人类动作。
2.负载适应性
承受额定负载+惯性力(如200kg负载下的关节冲击),瞬时过载能力≥200%额定扭矩(应对突发碰撞或负载突变);协作机器人需力控精度≤±0.1N(实现轻柔装配,如易碎品搬运)。
3.环境耐受性
防护等级≥IP65(防尘防水),适应洁净室(Class 1000无尘)、高温(焊接区≥100℃)、高电磁干扰(如电机制造车间)环境;医疗机械手需无菌涂层(通过ISO 10993生物相容性测试),工作温度0-40℃、湿度20-80%RH。
4.能效与噪音
传动效率≥90%(降低高速运行能耗),运行噪音≤70dB(协作机器人需≤65dB,避免干扰人工);高速分拣机械手(如Delta)噪音需控制在≤75dB(ISO 4871标准)。
5.维护便捷性
采用免润滑或长周期润滑设计(如固体润滑脂),关键部件(减速机密封件、导轨滑块)更换时间≤30分钟;模块化关节设计(如快换减速机)便于现场维修,降低停机损失。
6.智能化兼容
支持EtherCAT、Profinet等工业总线通信,与控制器实时交互,实现力控反馈(关节力矩传感器)、视觉引导(与工业相机联动纠偏)、故障预警(如减速机磨损超限提醒);协作机器人需开放API接口,支持二次开发(如自定义运动轨迹)。